





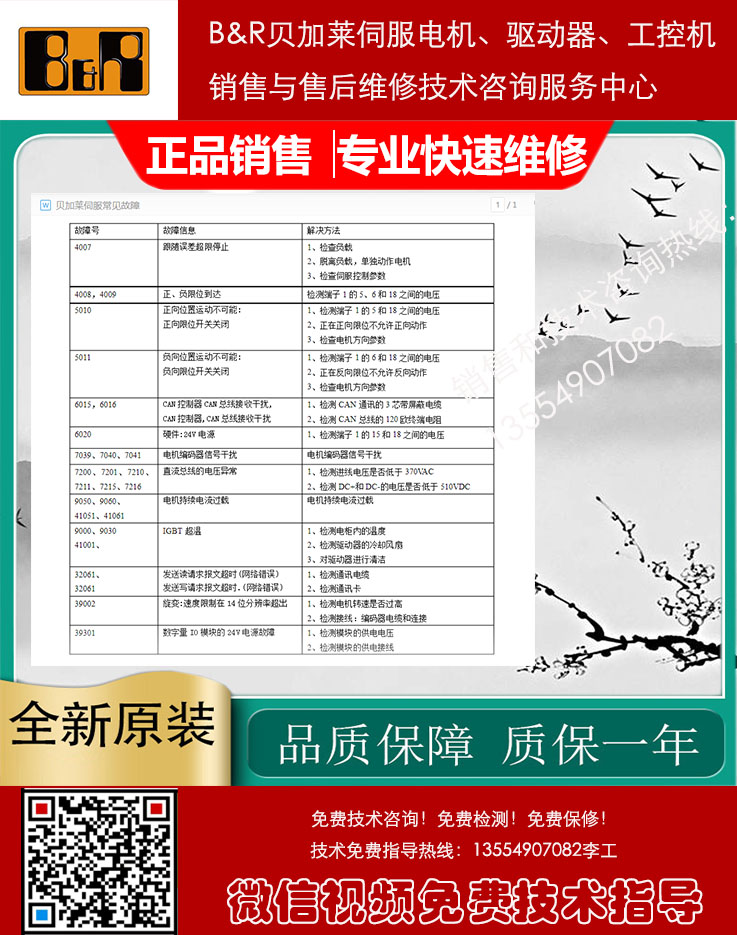
贝加莱驱动器报警代码7041 7039 7040 贝加莱伺服驱动器怎样查故障代码
专业维修贝加莱伺服驱动器 伺服控制器维修中心 贝加莱伺服驱动器报警维修 贝加莱伺服电机维修 贝加莱放大器报警维修
专业维修高精度的贝加莱控制器,贝加莱伺服驱动常见故障代码:
4005:使能控制器无效,驱动器错误、 4007:跟随误差限停止、
6020:硬件:24V电源、 6021:启动锁出激活
6045:功率级:连接X5:无电流、 6019:硬件:IGBT功率放大器过流
7210:连接电路:电压太低或不稳定、
7215:DC连接电路:至少一组动力线失败 、 7200:直流母线:过压、 7211:直流母线:电压降
- 检查电源线、
9002:散热器温度传感器:未连接或销毁、 32012:系统模块读取错误模块描述
32060从驱动得到的循环数据时>标志无效;等一些故障引起机器不能正常工作,
 .
.

B&R贝加莱伺服电机销售咨询服务,销售服务标准:
质量保证!争做价格同行业最低,服务质量同行业最好的一个!
B&R贝加莱伺服电机技术咨询,维修咨询服务,售后服务标准:
免费咨询!免费技术指导!免费检测!
B&R贝加莱伺服电机技术咨询,维修售后质量标准:
原装配件!原装检测!原装技术标准!
B&R贝加莱伺服电机,B&R贝加莱伺服驱动器,直流伺服电机,PDF使用操作手册、一级代理商、安装调试、修理、安装接线图、故障、技术参数资料、产品说明书,选型等。
销售技术咨询服务电话13554907082李工(微信同号)
——★★★【承接维修单◆免费检测◆十五年代理销售服务更专业】★★★——
深圳市诚弘欣科技有限公司专业致力于伺服电机、驱动器、变频器等工控配件销售及维修的公司。
联系人:李仁
联系电话:0755-29613587
联系手机:13554907082 微信号
网址:http://www.chxsz.com www.oil-gift.com www.szsfwx.com QQ:184860417、1473293320
B&R贝加莱Acopos伺服驱动器、伺服电机、触摸屏销售与售后咨询维修服务中心
B&R贝加莱Acopos伺服驱动器、伺服电机、触摸屏销售与售后咨询维修服务中心,专业提供B&R贝加莱Acopos伺服驱动器产品的销售维修服务,包括:B&R贝加莱Acopos伺服电机,B&R贝加莱Acopos直流伺服电机,B&R贝加莱Acopos控制器,B&R贝加莱Acopos变频器,B&R贝加莱Acopos伺服驱动器、B&R贝加莱Acopos触摸屏主机电脑及其它配件。公司拥有一支技术实力雄厚、维修经验丰富的工程师,专业从事B&R贝加莱Acopos伺服驱动器产品销售维修多年,针对B&R贝加莱Acopos伺服驱动器各系列产品均可做到芯片级的专业维修,维修速度快,质量高、收费合理。
免费技术咨询!免费检测!免费保修!
B&R贝加莱Acopos伺服电机马达销售与售后咨询维修服务中心
B&R贝加莱Acopos伺服驱动器控制器销售与售后咨询维修服务中心

专业维修贝加莱伺服驱动器 伺服控制器维修中心 贝加莱伺服驱动器报警维修 贝加莱伺服电机维修 贝加莱放大器报警维修
专业维修高精度的贝加莱控制器,贝加莱伺服驱动常见故障代码:
4005:使能控制器无效,驱动器错误、 4007:跟随误差限停止、
6020:硬件:24V电源、 6021:启动锁出激活
6045:功率级:连接X5:无电流、 6019:硬件:IGBT功率放大器过流
7210:连接电路:电压太低或不稳定、
7215:DC连接电路:至少一组动力线失败 、 7200:直流母线:过压、 7211:直流母线:电压降
- 检查电源线、
9002:散热器温度传感器:未连接或销毁、 32012:系统模块读取错误模块描述
32060从驱动得到的循环数据时>标志无效;等一些故障引起机器不能正常工作,
ACOPOS 贝加莱伺服出错代码表(全)
ACOPOS 出错代码表
1: 参数 ID 无效 Parameter ID invalid
2: 参数不可读 ( 变量不能在该时刻读取) Parameter can not be read (value is not available at the
moment)
3: 对只读参数写访问 Write access for a read only parameter
4: 对只写参数读访问 Read access for a write only parameter
5: 参数数值无效 Value of parameter is invalid
(REAL): 变量格式 Info(REAL): Value of Parameter
6: 参数数值无效 Value of parameter is invalid
(UDINT): 变量格式 Info(UDINT): Value of Parameter
7: 参数数值无效 Value of parameter is invalid
(DINT): 变量格式 Info(DINT): Value of Parameter
8: 数据块读访问已经初始化 Data block read access already initialized
9: 数据块写访问已经初始化 Data block write access already initialized
10: 数据块读访问未初始化 Data block read access not initialized
11: 数据块写访问未初始化 Data block write access not initialized
12: 数据块读访问仍激活 ( 读访问初始化不可能)
Data block write access still active (INIT for read access not possible)
13: 数据块写访问仍激活(写访问初始化不可能)
Data block read access still active (INIT for write access not possible)
14: 读响应超时 Timeout for Read Response
15: 写响应超时 Timeout for Write Response
16: 数据块数据段在读已经在最后 The Data segment at data block read is already the last
17: 数据块数据段在写已经在最后 The Data segment at data block write is already the last
18: 数据块数据段未在读在最后 The Data segment at data block read is not yet the last
Info(UDINT): 数据块偏移 Data block offset
19: 数据段未在写数据块的最后
Info(UDINT): 数据块偏移 Data block offset
20: 数据块读后检验和无效 Checksum after data block read is invalid
21: 数据块写后检验和无效 Checksum after data block write is invalid
22: 参数 ID 在数据块中无效(读数据块) Parameter ID in data block is invalid (data block read)
Info('PARID'): Parameter ID
23: 参数 ID 在数据块中无效(写数据块) Parameter ID in data block is invalid (data block write)
Info('PARID'): Parameter ID
24: 在启动状态不允许下载系统模块 System module download not allowed in this boot state
Info(UINT): Boot state
25: 只在下载后允许立即烧结系统模块 Burn system module only allowed immediately after download
26: 在启动状态不允许改变启动状态请求 Requested change of boot state is not allowed in this boot
state
Info(UINT): Boot state
27: 启动操作系统不可能(操作系统不在FPROM 存储器中)
Start of operating system not possible (operating system is not on the FPROM)
28: 在此驱动状态不允许读参数 Read parameter not allowed in this drive state
Info(UINT): Drive state
29: 在此驱动状态
文库
不允许写参数 Write parameter not allowed in this drive state
Info(UINT): Drive state
30: 因为硬件故障不能读参数 Read parameter not possible because of hardware error
Info(UINT): Hardware error
31: 因为硬件故障不能写参数 Write parameter not possible because of hardware error
Info(UINT): Hardware error
32: 命令参数无效 Command parameter is invalid
Info('PARID'): Parameter ID
40: 参数数值大于最大值 Value of parameter higher than maximum value
Info(REAL): Maximum value
41: 参数数值大于最大值 Value of parameter higher than maximum value
Info(UDINT): Maximum value
42: 参数数值大于最大值 Value of parameter higher than maximum value
Info(DINT): Maximum value
43: 参数1 数值大于最大值 Value of parameter1 higher than maximum value
Info(REAL): Maximum value
44: 参数1 数值大于最大值 Value of parameter1 higher than maximum value
Info(UDINT): Maximum value
45: 参数1 数值大于最大值 Value of parameter1 higher than maximum value
Info(DINT): Maximum value
46: 参数2 数值大于最大值 Value of parameter2 higher than maximum value
Info(REAL): Maximum value
47: 参数2 数值大于最大值 Value of parameter2 higher than maximum value
Info(UDINT): Maximum value
48: 参数2 数值大于最大值 Value of parameter2 higher than maximum value
Info(DINT): Maximum value
49: 参数3 数值大于最大值 Value of parameter3 higher than maximum value
Info(REAL): Maximum value
50: 参数3 数值大于最大值 Value of parameter3 higher than maximum value
Info(UDINT): Maximum value
51: 参数3 数值大于最大值 Value of parameter3 higher than maximum value
Info(DINT): Maximum value
52: 参数数值小于最小值 Value of parameter lower than minimum value
Info(REAL): Minimum value
53: 参数数值小于最小值 Value of parameter lower than minimum value
Info(UDINT): Minimum value
54: 参数数值小于最小值 Value of parameter lower than minimum value
Info(DINT): Minimum value
55: 参数1 数值小于最小值 Value of parameter1 lower than minimum value
Info(REAL): Minimum value
56: 参数1 数值小于最小值 Value of parameter1 lower than minimum value
Info(UDINT): Minimum value
57: 参数1 数值小于最小值 Value of parameter1 lower than minimum value
Info(DINT): Minimum value
58: 参数2 数值小于最小值 Value of parameter2 lower than minimum value
Info(REAL): Minimum value
59: 参数2 数值小于最小值 Value of parameter2 lower than minimum value
Info(UDINT): Minimum value
60: 参数2 数值小于最小值 Value of parameter2 lower than minimum value
Info(DINT): Minimum value
61: 参数3 数值小于最小值 Value of parameter3 lower than minimum value
Info(REAL): Minimum value
62: 参数
3 数值小于最小值 Value of parameter3 lower than minimum value
Info(UDINT): Minimum value
63: 参数3 数值小于最小值 Value of parameter3 lower than minimum value
Info(DINT): Minimum value
64: 硬件ID 在B&R 模块中无效(数据块写) Hardware ID in B&R module is invalid (data block
write)
Info(USINT): Hardware ID
65: 硬件版本在B&R 模块中无效(数据块写)
Hardware Version in B&R module is invalid (data block write)
Info(USINT): Hardware Revision
66: 硬件ID 的操作系统不兼容现在的总线网络
Hardware ID of operating system is incompatible to the existing network
Info(USINT): Hardware ID
1001: 数据先进先出溢出 Error FIFO overflow
1002: 参数超出有效范围 Parameter outside the valid range
1003: 在回路控制激活时不允许写参数 Writing parameter is not allowed during loop control is
active
1004: 激活信号控制网络超时 Timeout in network live sign control
1005: 在动作激活时不允许写参数 Writing parameter is not allowed during a movement is active
1006: 用于触发事件(数字量输入+ 边沿)无效参数
Invalid parameter for trigger event (digital input + edge)
1007: 主站用于网络耦合未激活-一个主站已经发送
Master for network coupling deactivated - one master is already sending
1008: 主站用于网络耦合未激活-编码器错误 Master for network coupling deactivated - Encoder error
1009: 内存分配错误 Error on memory allocation
1010: 先进先出功能块溢出 Function FIFO overflow
1011: 快停输入激活 Quickstop input active
1012: 循环网络通信切断 Breakdown of cyclic network communication
1013: 用于网络通信的站点不可行 Station is not available for network communication
1014: AC112 命令接口占用 AC112 command interface is occupied
2001: 上载跟踪曲线数据不允许:记录激活 Upload of trace data not allowed: Recording active
2002: 无跟踪曲线数据可上载 No trace data available for upload
2003: 跟踪曲线启动不允许:记录激活 Trace start not allowed: Recording active
2004: 跟踪曲线启动不允许:未定义跟踪数据Trace start not allowed: No trace test data defined
2005: 无效的参数ID 用于跟踪测试数据 Invalid parameter ID for trace test data
Info('PARID'): Parameter ID
2006: 初始跟踪参数不允许:记录激活 Initialization of trace parameters not allowed: Recording
active
4002: 在仿真命令无效的动作代码 Invalid action code in simulation command
4004: 在控制器命令无效的动作代码 Invalid action code in controller command
4005: 使能控制器无效:驱动器错误 Switch controller on not possible: Drive in error state
4007: 跟随误差超限停止 Lag error stop limit exceeded
Info(REAL): Current lag error
4008: 正限位开关到达 Positive limit switch r
eached
4009: 负限位开关到达 Negative limit switch reached
4010: 使能控制器无效:两限位关闭 Switch controller on not possible: Both limit switches are
closed
4011: 关闭控制器无效:运动激活 Switch controller off not possible: Movement active
4012: 使能控制器无效:初始参数丢失或无效
Switch controller on not possible: Initial parameter missing or not valid
Info('PARID'): Parameter ID
4014: 双编码器控制:位置偏差超限停止 Two encoder control: Stop limit of positions difference
exceeded
Info(REAL): Current positions difference
5001: 目标位置大于正向软限位 Target position > positive SW limit
5002: 目标位置小于负向软限位 Target position < negative SW limit
5003: 正向软限位到达 Positive SW limit reached
5004: 负向软限位到达 Negative SW limit reached
5005: 运动启动不可能:位置控制器未激活 Start of movement not possible: Position controller
inactive
5006: 运动启动不可能:轴未寻参考位置 Start of movement not possible: Axis not referenced
5010: 正向位置运动不可能:正向限位开关关闭
Move in pos. direction not possible: Pos. limit switch is closed
5011: 负向位置运动不可能:负向限位开关关闭
Move in neg. direction not possible: Neg. limit switch is closed
5012: 运动启动不可能:停止激活 Start of movement not possible: Stop ramp active
5013: 打开循环设值模式不可能:运动激活
Switching on cyclic set value mode is not possible: Movement active
5014: 关闭循环设值模式不可能 Switching off cyclic set value mode is not possible
5015: 运动启动不可能:正在寻参 Start of movement not possible: Homing procedure active
5016: 写参数不允许:正在寻参 Write parameter not allowed: Homing procedure active
5017: 寻参步骤模式不可能:位置控制器未激活
Homing procedure mode not possible: Position controller inactive
5018: 寻参步骤模式不可能:运动激活 Homing procedure not possible: Movement active
5019: 寻参参数超出有效值 Homing parameter outside the valid range
Info('PARID'): Parameter ID
5020: 寻参步骤不可能;两个限位开关关闭 Homing procedure not possible: Both limit switches are
closed
5021: 限位开关关闭;无方向改变用于寻参 Limit switch closed: No direction change for this homing
mode
5022: 第二个限位开关信号收到:参考开关信号未发现 Second limit switch signal received: Reference
switch not found
5023: 对于当前运动方向收到不正确的限位开关信号 Incorrect limit switch signal received for current
movement direction
5024: 循环设置数据模式放弃:设定位置丢失 Cyclic set value mode aborted: Set positions missing
5025: 设置参考点位置偏
差用于修正计数范围不可能 Set homing offset with correction of counting range not possible
5026: 基本运动参数超过速度限制 Basis movement parameter (with override) exceed speed limit
value
5027: 基本运动参数超过加速度限制 Basis movement parameter (with override) exceed acceleration
limit value
5028: 当前运动不是基本运动 Current movement is no basis movement
5029: 触发忽略-保持位置超过软限位 Trigger ignored - remaining distance exceeds SW limit
5030: 寻参步骤模式不可能:位置控制器激活 Homing procedure mode not possible: Position controller
active
5031: 寻参步骤模式不可能:循环设值模式关闭 Homing procedure mode not possible: Cyclic set values
mode is off
5101: 凸轮曲线补偿:超出界限值 Cam profile compensation gears: Limit values exceeded
5102: 过多的变化在每个凸轮曲线(主周期过短) Too many changes of cam profile per cycle (master
period too short)
5103: 从触发先进先出满 Slave trigger FIFO full
5104: 从触发先进先出空 Slave trigger FIFO empty
5105: 主触发先进先出满 Master trigger FIFO full
5106: 主触发先进先出空 Master trigger FIFO empty
5107: 启动凸轮曲线连接不可能:参数超出有效值 Start cam profile linkage not possible: Parameter
outside the valid range
Info('PARID'): Parameter ID
5108: 主补偿触发先进先出满 Master compensation trigger FIFO full
5109: 主补偿触发先进先出空 Master compensation trigger FIFO empty
5110: 凸轮曲线连接放弃:循环设定位置丢失 Cam profile linkage aborted: Cyclic set positions
missing
5111: 凸轮曲线连接放弃:编码器错误 Cam profile linkage aborted: Encoder error
5112: 命令不允许:凸轮曲线连接未激活 Command not allowed: Cam profile linkage not active
5113: 命令不允许:控制器仍激活 Command not allowed: Controller is still active
5114: 写参数不允许:凸轮曲线连接激活 Write parameter not allowed: Cam profile linkage active
5115: 重启命令不可能:凸轮时序以前从未激活 Restart command not possible: The cam automat was never
active before
5201: 写参数不允许:鼓序列激活 Write parameter not allowed: Drumsequencer active
5202: 鼓序列发生器:位置不在上升顺序 Drumsequencer: Switch positions not in ascending order
5300: 数据块上载无效: Data block for upload is not available
5302: 写参数不允许:凸轮时序激活 Write parameter not allowed: Cam automat active
5303: 凸轮曲线未提供索引 Cam profile data no
t available at index
5304: 格式错误在凸轮曲线数据 Format error in cam profile data
Info(UINT): Detail
5306: 补偿:入口速度超限 Compensation gears: Speed for entrance exceeds limit value
5307: 补偿:连接速度超限 Compensation gears: Speed for connection exceeds limit value
5308: 补偿:最大爬坡超出 Compensation gears: Maximum jolt exceeded
5311: 凸轮时序:事件指向未初始化状态 Cam automat: Event leads to non initialized state
5312: 仅事件类型ncTRIGGER1/2 能进入ncLATCHPOS 补偿
Only event type ncTRIGGER1/2 possible for entry in ncLATCHPOS compensation
5315: 下载错误:凸轮曲线数据被凸轮时序使用 Download error: Cam profile data in use by cam automat
5316: 事件类型ncST_END+ncNEGATIVE 不能进入补偿
Event type ncST_END+ncNEGATIVE is not possible for entry in compensation gears
5317: 启动凸轮时序指向未初始状态 Start of cam automat leads to non initialized state
5318: 主轴相对位置高于凸轮曲线周期 Relative distance of master axis higher than cam profile
period
5319: 凸轮曲线数据不能用于状态0 Cam profile data not allowed for state 0
6000: 主站采样时间不是位置控制器采样时间的整数倍
Master sampling time is not a multiple of position controller sampling time
6001: 同步控制器:同步报文超时 Sync controller: Timeout for sync telegram occured
6002: 同步控制器:系统时间偏差超出
Sync Controller: Error tolerance of system time difference exceeded
6003: 控制器在位置模式仍激活 Controller is still active in position mode
6004: 控制器在速度模式仍激活 Controller is still active in speed mode
6005: 控制器在力矩模式仍激活 Controller is still active in torque mode
6006: 控制器在定子电压旋转磁场模式仍激活 Controller is still active in stator voltage rotating
field mode
6007: 控制器在定子电流旋转磁场模式仍激活 Controller is still active in stator current rotating
field mode
6008: 控制器仍激活 Controller is still active
6009: 参数写保护对现有电机模式 Parameter is write protected for existing motor type
6010: 参数写保护对现有编码器模式 Parameter is write protected for existing encoder type
6011: 控制器不在速度模式 Controller is not in speed mode
6012: CAN 控制器:没有CAN 对象空闲 CAN controller: No CAN object free
6013: 双编码器控制器激活 Two encoder control active
6014: 驱动器初始化激活
Drive initialisation active
6015: CAN 控制器:CAN 总线接收干扰
CAN controller: CAN bus disturbance (receive error counter >= 96)
Info(USINT): Slot
6016: CAN 控制器:CAN 总线发送干扰 CAN controller: CAN bus disturbance (transmit error
counter >= 96)
Info(USINT): Slot
6017: 软件:看门狗激活 Software: Watchdog active
6018: 硬件:15 电源失败 Hardware: 15V power supply fail
6019: 硬件:IGBT 功率放大器过流 Hardware: Overcurrent in IGBT
6020: 硬件:24V 电源失败 Hardware: 24V power supply fail
6021: 启动锁出激活 Starting lockout active
6022: 电流控制器:允许电流偏差值超出 Current controller: Permissible current offset values
exceeded
6023: 硬件:累积错误激活 Hardware: Sum error active
6024: 电流记录在转变前 Current was latched befor conversion (OpSys error in ABLS)
6025: 温度记录在转变前 Temperature was latched befor conversion (OpSys error in ABLS)
6026: 保持制动器:定子电流超过限制 Holding brake: Stator current limit exeeded during release
6027: 保持制动器:手动操作不允许 Holding brake: Manual operation not permitted
6028: 保持制动器:低于电压/ 电流(接线,检查24VDC)
Holding brake: Undervoltage/-current (wire breakage, check 24V supply)
6029: 保持制动器:电压或电流失败(接线,检查24VDC)
Holding brake: Voltage- or currentfail (wire breakage, check 24V supply)
6030: 保持制动器:制动输出激活,但无制动进入电机数据
Holding brake: Brake output is active, but no brake entered in motor data
6031: 系统模块已检测 System module already deleted
6032: 接口:FPGA 组态错误 Interface: FPGA configuration error
Info(USINT): Slot
6033: EEPROM :重要数据无效 Serielles EEPROM: Critical datum is not valid
6034: 循环设置数值放弃:设定速度丢失 Cyclic set value mode aborted: Set speeds missing
6035: 上载编码器未提供 Load encoder not available
6037: 力矩限制《0.0 Torque limit <= 0.0
6038: 力矩限制》最大允许力矩 Torque limit > maximum permissible torque
Info(REAL): Maximum permissible torque
6039: PID 控制器错误超限停止 PID controller error stop limit exceeded
Info(REAL): Current PID controller error
6040: 参数功能不支持Parameter function not supported. (Modul ?)
Info(UINT): Slot
7014: Endat 编码器:CRC 校验错误传送参数Endat encoder: CRC error during
transfer parameter
Info(USINT): Slot
7015: Endat 编码器:超时错误传送参数Endat encoder: Timeout error during transfer parameter
Info(USINT): Slot
7016: Endat 编码器:繁忙错误传送参数Endat encoder: Busy error during transfer parameter
Info(USINT): Slot
7017: Endat 编码器:错误读编码器参数Endat encoder: Error while reading encoder parameter
Info(USINT): Slot
7019: OEM 数据无效OEM data not valid
Info(USINT): Slot
7020: OEM 数据:数据写错误OEM data: Data write error
Info(USINT): Slot
7021: Endat 编码器:超时错误读绝对位置Endat encoder: Timeout error while reading absolut
position
Info(USINT): Slot
7022: Endat 编码器:初始化未激活Endat encoder: Initialization is active
Info(USINT): Slot
7023: Endat 编码器:参数传送激活Endat encoder: Parameter transfer is active
Info(USINT): Slot
7025: OEM 数据:无效电机类型OEM data: Invalid motor type
7028: OEM 数据:数据模块不兼容现有操作系统
OEM data: Data modul not compatible with operating system
7030: Endat 编码器:模拟信号干扰Endat encoder: Analog track disturbance
Info(USINT): Slot
7032: Endat 编码器:未连接Encoder: No connection
Info(USINT): Slot
7036: 编码器:接口ID 无效(检查插槽和接口EEPROM 数据)
Encoder: Interface ID invalid (Check slot and Interface EEPROM data)
Info(USINT): Slot
7038: 编码器:位置数据不同步和绝对值)
Encoder: Position value not synchronous with absolute value
Info(USINT): Slot
7039: 增量编码器:电缆干扰A 线Incremental encoder: Cable disturbance track A
Info(USINT): Slot
7040: 增量编码器:电缆干扰B 线Incremental encoder: Cable disturbance track B
Info(USINT): Slot
7041: 增量编码器:电缆干扰R 线Incremental encoder: Cable disturbance track R
Info(USINT): Slot
7042: 增量编码器:边沿位置信号太小Incremental encoder: Edge distance of quadrature signal too
small
Info(USINT): Slot
7043: SSI 编码器:电缆干扰D 线SSI encoder: Cable disturbance track D
Info(USINT): Slot
7044: SSI 编码器:极性SSI encoder: Parity
Info(USINT): Slot
7045: 旋变:电缆干扰核对Resolver: Cable disturbance (plausibility check)
Info(UINT): Slot
7046: 旋变:电缆干扰Resolver: Cable disturbance
Info(UINT): Slot
7200: DC 连接电路:硬件过压检测 DC link circuit: Overvoltage detected by Hardware
Info(REAL): DC link voltage
7201: DC 连接电路:过压DC link circuit: Overvoltage
Info(REAL): DC link voltage
7210: DC 连接电路:电压太低或不稳定DC link circuit: Voltage too low or unstable (check the
power line)
Info(REAL): DC link voltage
7211: DC 连接电路:电压断线检查动力线DC link circuit: Voltage breakdown (check the power line)
Info(REAL): Low voltage limit
7212: DC 连接电路:电压断线急停中断
DC link circuit: Voltage breakd
own -> Emergency-Stop interrupted
Info(REAL): Low voltage limit
7213: DC 连接电路:时间常数决定激活动力线
DC link circuit: Time constant determination with activ power line
Info(REAL): DC link voltage
7214: DC 连接电路:电阻过热(太多动力线失败)
DC link circuit: Inrush resistor hot (To much power line fails)
7215: DC 连接电路:至少一相动力线失败DC link circuit: At least one phase of the power line
failed
7216: DC 连接电路制动:泄放功率超过最大值DC link circuit: Bleeder power higher than maximum
value
7300: 数字量IO:IO 组态无效Digital IO: IO Configuration invalid
Info(UINT): Slot
7301: 数字量IO:接口未提供Digital IO: Interface not available
Info(UINT): Slot
7302: 数字量IO:错误设置分辨率或增量Digital IO: Set wrong resolution or increment error
Info(UINT): Measured increments per encoder revolution
7400: 无效参数ID 用于循环数据Invalid parameter ID for cyclic data
7401: 参数位置超过最大数据长度Parameter position exceeds maximum data length
7402: 处理参数步骤放弃:写错误Processing of parameter sequence aborted: Write error
Info(UINT): Index of parameter
7403: 处理参数步骤仍激活Processing of parameter sequence is still active
7404: 参数步骤未提供在索引Parameter sequence not available at index
8001: EEPROM 选择无效EEPROM select not valid
8002: EEPROM 地址无效EEPROM address not valid
8003: 列表索引无效Table index not valid
8004: EEPROM 变量类型无效EEPROM variable type not valid
8005: EEPROM 类型无效EEPROM type not valid
8006: EEPROM 参数数值为零Value of EEPROM parameter is zero
Info(UINT): EEPROM Parameter ID
8007: EEPROM 参数数值无效Value of EEPROM parameter is not valid
Info(UINT): EEPROM Parameter ID
8008: EEPROM 参数数值大于最大值Value of EEPROM parameter higher than maximum value
Info(REAL): Maximum value
8009: EEPROM 参数数值小于最小值Value of EEPROM parameter lower than minimum value
Info(REAL): Minimum value
8010: 模块标志无效Modul identification not valid
Info(INT): Modul (0 processor plate,1 power plate,2 slot1,3 slot2,4 slot3,5
slot4)
8020: 无效开关频率Invalid switch frequency
9000: IGBT 表面温度过温Heatsink overtemperature
Info(REAL): Heatsink temperatur
9002: IGBT 表面温度传感器未连接或损坏
Temperature sensor in the heatsink is not connected or destroyed
Info(REAL): Heatsink temperatur
9003: IGBT 表面温度传感器未连接或损坏
Temperature sensor in the heatsink is not connected or destroyed
Info(REAL): Heatsink temperatur
9010: 电机超温Motor overtemperature
Info(REAL): Motor temperatur
9012: 电机温度传感器未连接或损坏Motor temperature sensor is not connected or destroyed
Info(REAL): Motor temperatur
9013: 短路电机温度Shorted Motor temperature
Info(REAL): Motor
temperatur
9030: IGBT PN 结超温Junction overtemperature
Info(REAL): Junction temperatur
9031: IGBT PN 结超温(没有急停)Junction overtemperature (Without Emergency-Stop)
Info(REAL): Junction temperatur
9040: 制动系统超温Bleeder overtemperature
Info(REAL): Bleeder temperatur
9050: 峰值电流过载Peak current overload (i2t)
Info(REAL): Peak current load [%]
9060: 持续电流过载Continuous current overload (i2t)
Info(REAL): Continuous current load [%]
9070: 电机超温(温度模型)Motor overtemperature (temperature model)
Info(REAL): calculated Motor temperatur
9300: 电流控制器(IGBT 功率放大器过流)电流不可测
Current controller: Overcurrent IGBT (current not measurable)
Info(REAL): Absolute value of the biggest phase current
9301: 电流控制器:停止因为IGBT 功率放大器过流
Current controller: Stop due to overcurrent IGBT (current not measurable)
Info(REAL): Modulo of the current phasor
32001: 调用CAN_xopen() 错误Error at call of CAN_xopen()
Info(UINT): Status of CAN_xopen()
32002: 用于广播命令定义写COB 时错误Error at definition of Write COB for Broadcast Command
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32003: 用于读请求定义写COB 时错误Error at definition of Write COB for Parameter Read
Request
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32004: 用于写请求定义写COB 时错误Error at definition of Write COB for Parameter Write
Request
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32005: 用于读反应定义读COB 时错误Error at definition of Read COB for Parameter Read
Response
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32006: 用于写反应定义读COB 时错误Error at definition of Read COB for Parameter Write
Response
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32007: 用于监视驱动器数据定义读COB 错误
Error at definition of Read COB for Monitor Data from the drive
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32008: 在发送读反应错误(网络错误?)Error at sending Read Request (network error ?)
Info(UINT): Status of CAN_sendCOB()
32009: 在发送写反应错误(网络错误?)Error at sending Write Request (network error ?)
Info(UINT): Status of CAN_sendCOB()
32010: 对读反应的驱动无反应(驱动存在于网络?)
No response of drive for Read Request (exists drive in network ?)
32011: 对写反应的驱动无反应(驱动存在于网络?)
No response of drive for Write Request (exists drive in network ?)
32012: 在系统模块读描述时错误Error at reading module description of system module
32013: 驱动器未装操作系统No operating system existing on the drive
32014: 操作系统版本和NC 管理器版本不兼容
Operating system version on the drive not compatibel with NC manager version
Info(UINT): Operating system version on the drive (hexadecimal)
32015: 创建信息请求错误Error at creation of message queue
Info(UINT): Status of q_create()
32016: 对NC 管理器任务发送空闲时间命令错误
Error at sending a idle time command to the NC Manager Task
Info(UINT): Status of q_send()
32017: 在启动操作系统后,错误的引导状态Wrong boot state after start of operating system
Info(UINT): Boot state
32018: 在系统模块中无效的参数ID Invalid Parameter ID in system module
32019: 下载NC 系统模块不允许(系统模块存在PCC)
Download of NC system module not allowed (the module exists on the PCC)
32020: 在NC 管理器中初始驱动不能读出系统模块数据
System module data could not be read from the drive at NC manager INIT
32021: 在下载后,从驱动器中不能够读出系统模块
System module data could not be read from the drive after download
32022: 在下载前,访问数据块放弃时错误Error at abort of data block access before download
32023: 在下载前,读引导状态区错误Error at reading boot state before download
32024: 在SW 复位下载前,读引导状态区错误Error at reading boot state after SW Reset before
download
32025: 在SW 复位下载前,状态区错误Wrong boot state after SW Reset before download
32026: 用于下载初始数据块写访问错误Error at INIT of data block write access for download
32027: 用于下载发送数据标识错误Error at sending data segment for download
32028: 用于下载发送数据标识超时Timout after sending data segment for download
32029: 用于下载发送数据标识反应错误Response error after sending data segment for download
32030: 在下载后,命令烧结系统模块命令错误Error at command for burn system module after download
32031: 在下载后,读状态烧结系统模块命令错误
Error at reading status for burn system module after download
32032: 在下载后,烧结系统模块命令错误Error at burn system module after download
32033: 在下载后,烧结系统模块命令超时Timeout at burn system module after download
32034: 在SW 复位下载前错误Error at SW Reset before download
32035: 在SW 复位下载后错误Error at SW Reset after download
32036: 在下载后,不同系统模块数据Different system module data after download
32037: 错误信息丢失因为FIFO 溢出(确认错误)
Error message(s) lost because of FIFO overflow (acknowledge errors)
32038: 查找初始化参数数据模块错误Error at searching INIT parameter data module
Info(UINT): Status of function MO_modul_search()
32039: 读初始化参数数据模块错误Error at reading INIT parameter data module
Info(UINT): Status of function MO_read()
32040: 初始化参数数据模块版本和NC 管理器版本不兼容
Version of INIT parameter data module is not compatible to NC manager
Info(UINT): Version of INIT parameter data module (hexadecimal)
32041: acp10cfg 模块不存在The module acp10cfg does not exist
32042: acp10cfg 模块不是NC 数据模块The module acp10cfg is no NC data module
32043: acp10cfg 模块不是有效的NC 模块类型The NC module type of the module acp10cfg is
invalid
32044: acp10cfg 模块NC 模块类型不可读The NC module type of the module acp10cfg cannot be
read
32045: acp10cfg 模块数据地址不可读The data address in module acp10cfg cannot be read
32046: acp10cfg 模块版本不兼容NC 管理器
Version of the module acp10cfg is not compatible with NC manager
32047: acp10cfg 模块站号无效 A node number in module acp10cfg is invalid
32048: acp10cfg 模块站号多次使用A node number in module acp10cfg is multiple used
32049: 跟踪启动已经激活Trace is already active at trace start
32050: 跟踪数据上载已经激活A Trace Data Upload is already active
32051: 用于跟踪数据上载的跟踪状态无效Invalid Trace Status for Trace Data Upload
32052: 用于跟踪数据上载ev_send() 错误Error at ev_send() for Trace Data Upload
Info(UINT): Status of function ev_send()
32053: 用于参数读请求2 的写COB 定义错误
Error at definition of Write COB for Parameter Read Request 2
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32054: 用于参数写请求2 的写COB 定义错误
Error at definition of Write COB for Parameter Write Request 2
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32055: 用于参数读请求2 的读COB 定义错误
Error at definition of Read COB for Parameter Read Response 2
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32056: 用于参数写请求2 的写COB 定义错误
Error at definition of Read COB for Parameter Write Response 2
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32057: 访问高速任务列表错误Error at access to HS task class table
Info(UINT): Status of SS_get_entry()
32058: 访问任务列表错误Error at access to task class table
Info(UINT): Status of SS_get_entry()
32059: 访问高速任务列表参数tk_no 无效Parameter tk_no invalid for access to task class table
Info(UINT): Value of tk_no
32060: 从驱动得到的循环数据超时》标志无效(网络错误?)
Timeout for cyclic data from drive => Indications invalid (network error ?)
32061: 发送读请求报文超时(网络错误?)
Timeout for sending a Read Request Telegram (network error ?)
32062: 发送写请求报文超时(网络错误?)
Timeout for sending a Write Request Telegram (network error ?)
32063: 数据地址为零(设/ 读参数通过
SERVICE 通道)
Data address zero (set/read parameter via service interface)
32064: 参数类型不能设置可选的
ncDATA_TEXT Parameter with that type cannot be set with option ncDATA_TEXT
32065: 参数类型不能读取可选的
ncDATA_TEXT Parameter with that type cannot be read with option ncDATA_TEXT
32066: 参数ID 零(设/ 读参数通过SERVICE 通道)
Parameter ID zero (set/read parameter via service interface)
32067: 参数ID 无效(设/ 读参数通过可选的ncDATA_TEXT )
Parameter ID invalid (set/read parameter with option ncDATA_TEXT)
32068: 下载新的BS Loader acp10bsl 版本是必须的
Download of new version of BS Loader acp10bsl to the drive is necessary
Info(UINT): Version of BS Loader on the drive (hexadecimal)
32069: acp10cfg 模块的电机参数数据地址是不可读的
The data address of the motor parameters in module acp10cfg cannot be read
32070: acp10cfg 模块的电机参数驱动未发现Drive for motor parameters in module acp10cfg not
found
Info(UINT): Interface index (in HB) and node number (in LB) of this drive
32071: 电机参数无效(升级AS 必须)
The motor parameters are invalid (an update of AutomationStudio is necessary)
32072: 在SW 复位后错误的引导状态Wrong boot state after SW Reset
Info(UINT): Boot state
32073: 下载NC 系统模块:读取BS Loader 中的NC HW 版本错误
Download of NC system module: Error at reading NC HW Version of BS Loader
32074: 不兼容NC HW 版本:下载BS Loader 不可能
Incompatible NC HW Version: Download of BS Loader not possible
32075: 不兼容NC HW 版本:下载操作系统
不可能Incompatible NC HW Version: Download of operating system not possible
32076: FIFO 用于高级别信息到NC 管理器的任务满
FIFO for messages with high priority to NC Manager Task is full
32095: 在CAN-组态模块的驱动组的数值高于最大值
Value of drive group in CAN-CFG-Module higher than maximum value
Info(UINT): Maximum value
32096: 用于跟踪数据上载的数据缓冲区的尺寸在acp10cfg 中
太小Size of data buffer for trace data upload in module acp10cfg too small
32097: 用于CAN 接口的acp10cfg 的计数值为零
The count of used CAN interfaces in module acp10cfg is zero
32098: acp10cfg 模块的数据是空 The Data section of module acp10cfg is empty
Info(UINT): Number of data section
32099: acp10cfg 模块的数据长度太小Length of data section of module acp10cfg is too small
Info(UINT): Number of data section
32100: 用于NC 错误管理的内存不能被收集
Memory for NC error text management cannot be allocated
Info(UINT): Status of SM_malloc()
32101: 在BR 系统模块列表的NC 访问错误Error at access to NC error text module in B&R module
table
Info(UINT): Status of SS_get_entry()
32102: 错误文本模块的版本ID 不同于NC 管理器
Version ID of error text module not equal to that
of NC manager
32103: 错误文本模块的数据不可读Data section of error text module cannot be read
Info(UINT): Number of data section
32104: 错误文本模块的数据是空Data section of error text module is empty
Info(UINT): Number of data section
32105: 错误文本模块的数据长度太小Length of data section of error text module is too small
Info(UINT): Number of data section
32106: 错误文本模块不同于NC 管理器的错误列表
Error list of error text module not equal with that of NC manager
Info(UINT): First invalid error number
32107: 错误文本模块不同于NC 管理器的参数列表
Parameter list of error text module not equal with that of NC manager
Info(UINT): First invalid parameter ID
32108: 错误文本模块的最后一个错误代码不等于65535
The last error number of error text module is not equal to 65535
32109: 错误文本模块的最后一个参数ID 不等于65535
The last parameter id of error text module is not equal to 65535
32110: 在CAN-组态模块的数据长度不可读Length of data section of CAN-CFG-Module cannot be read
Info(UINT): Status of function MO_section_lng()
32111: 在CAN-组态模块的数据长度太小Length of data section of CAN-CFG-Module is too small
Info(UINT): Expected length
32112: 在CAN-组态模块的数据地址不可读The data address in the CAN-CFG-Module cannot be read
Info(UINT): Status of function MO_read()
32113: 在CAN-组态模块的势能代码无效The enable code in the CAN-CFG-Module is invalid
32114: 在CAN-组态模块的保留区的数据不等于零
Values not equal to zero in reserved area of CAN-CFG-Module
32115: 在CAN-组态模块的基本CAN ID 用于写/ 读通道1 无效
The basis CAN ID for WR/RD channel1 in the CAN-CFG-Module is invalid
32116: 在CAN-组态模块的基本CAN ID 用于写/ 读通道2 无效
The basis CAN ID for WR/RD channel2 in the CAN-CFG-Module is invalid
32117: 在CAN-组态模块的基本CAN ID 用于写/ 读通道3 无效
The basis CAN ID for WR/RD channel3 in the CAN-CFG-Module is invalid
32118: 在CAN-组态模块的基本CAN ID 用于监视数据无效
The basis CAN ID for monitor data in the CAN-CFG-Module is invalid
32119: 在CAN-组态模块的基本CAN ID 用于对驱动器循环数据无效
Invalid basis CAN ID for cyclic data to the drive in CAN-CFG-Module
32120: 在CAN-组态模块的基本CAN ID 用于从驱动器循环数据无效
Invalid basis CAN ID for cyclic data from the drive in CAN-CFG-Module
32121: 在CAN-组态模块的基本CAN ID 用于同步报文无效
The CAN ID for the SYNC telegram in the CAN-CFG-Module is invalid
32122: 在CAN-组态模块的基本CAN ID 用于广播报文无效
The CAN ID for the braodcast command in the CAN-CFG-Module is invalid
32123: 定义读COB 对WR2 写请求错误(特殊模式)
Error at definition of Read COB for WR2 Request (special mode)
Info(UDINT): CAN
-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and LB)
32124: 定义读COB 对WR2 写响应错误(特殊模式)
Error at definition of Read COB for WR2 Response (special mode)
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32125: 定义读COB 对RD2 读请求错误(特殊模式)
Error at definition of Read COB for RD2 Request (special mode)
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32126: 定义读COB 对RD2 读响应错误(特殊模式)
Error at definition of Read COB for RD2 Response (special mode)
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32127: 用于广播命令检测写COB 时错误(特殊模式)
Error at deletion of Write COB for Broadcast Command (special mode)
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_deleteCOB() (in MLB and
LB)
32128: 用于广播命令检测读COB 时错误(特殊模式)
Error at definition of Read COB for Broadcast Command (special mode)
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32129: 从驱动器对于循环用户数据读COB 出错(特殊模式)
Error at Read COB Def. for cyclic user data from the drive (special mode)
Info(UDINT): CAN-ID (in HB und MHB) and Status of CAN_defineCOB() (in MLB and
LB)
32130: 具体仅允许一个CAN 接口This special mode is only allowed with one CAN interface
Info(UINT): Count of used CAN interfaces
32131: 具体数据模块不存在The specified NC data module does not exist
32132: 具体不在NC 数据模块中The specified module is no NC data module
32133: 具体NC 数据模块的NC 模块类型无效NC module type of the specified NC data module is
invalid
Info(UINT): Requested type (in HB) and type of NC data module (in LB)
32134: 具体NC 数据模块的NC 模块类型不可读
The NC module type of the specified NC data module cannot be read
Info(UINT): Status of function MO_read()
32135: 具体NC 数据模块的数据地址不可读
The data address of the specified NC data module cannot be read
Info(UINT): Status of function MO_read()
32136: 具体NC 数据模块的数据空The Data section of the specified NC data module is empty
Info(UINT): Number of data section
32137: 用于数据块操作的结构数据地址为零Data address of structure for a data block operation is
zero
32138: 数据地址为零(用户数据块操作)Data address zero (user data for data block operation)
32139: 数据长度零(用户数据块操作)Data length zero (user data for data block operation)
32140: 数据块操作:数据模块名称或地址必须为零)
Data block operation: Data module name or data address must be zero
32141: 在参数步骤中无效的数据格式Invalid data format in a parameter sequence
32142: 参数的ID 或类型无效在参数步骤文本
格式
ID or type of a parameter invalid in parameter sequence with text format
Info(UDINT): Index of this parameter in the parameter sequence
32143: 参数数据在参数步骤大于4 个字节
Data of a parameter in a parameter sequence longer than 4 bytes
Info(UDINT): Index of this parameter in the parameter sequence
32200: 调用plAcycWrite() 错误Error at call of plAcycWrite()
Info(UINT): Status of plAcycWrite()
32201: 调用plAcycWrite() 错误Error at call of plAcycWrite()
Info(UINT): Status of plAcycWrite()
32202: 调用plAcycRead() 错误Error at call of plAcycRead()
Info(UINT): Status of plAcycRead()
32203: 调用plAcycRead() 错误Error at call of plAcycRead()
Info(UINT): Status of plAcycRead()
32204: 通过循环通道读参数超时(驱动器存在于网络?)
Timeout for parameter read via acyclic channel (exists drive in network ?)
32205: 通过循环通道写参数超时(驱动器存在于网络?)
Timeout for parameter write via acyclic channel (exists drive in network ?)
32206: 循环通道1:不管写反应读请求Cyclic channel: Read Request in spite of Wait for Response
32207: 循环通道1:不管写反应写请求Cyclic channel: Write Request in spite of Wait for Response
32500: FIFO 信息已存在The Message FIFO is already existing
32501: 创建FIFO 信息错误Error at creation of Message FIFO
Info(UINT): Status of RtkCreateFifo()
32502: 命令标志已存在The Command Semaphore is already existing
32503: 创建命令标志错误Error at creation of Command Semaphore
Info(UINT): Status of RtkCreateSemaphore()
32504: NC 管理器空闲任务已存在The NC Manager Idle Task is already existing
32505: 创建NC 管理器空闲任务错误Error at creation of Nc Manager Idle Task
Info(UINT): Status of RtkCreateTask()
32506: 读任务级别循环时间错误Error reading Taskclass Cycle Time
Info(UINT): Status of GetTaskclassCycleTime()
32507: 读任务级别容忍错误Error reading Taskclass Tolerance
Info(UINT): Status of GetTaskclassMaxCycleTime()
32508: 在发送一个空闲时间命令对NC 管理器任务错误
Error at sending a idle time command to the NC Manager Task
Info(UINT): Status of RtkWriteFifo()
33000: 主循环时间不是通信循环时间的整数倍
Master cycle time is not a multiple of communication cycle time
36001: 参数限定在有效范围Parameter limited to valid range
36002: 位置环控制的整个时间限定在规定时间
Total time for the position loop controller limited to prediction time
37101: 从轴上补偿距离计算限定在最大值
Calculated compensation distance on slave axis limited to maximum
37102: 从轴上补偿距离计算限定在最小值
Calculated compensation distance on slave axis limited to minimum
37103: 从触发超出窗口Slave trigger out of window
37104: 从触发丢失Slave trigger missing
37105: 主补偿触发超出
窗口Master compensation trigger out of window
37106: 主补偿触发丢失Master compensation trigger missing
37107: 不可替换实际/ 设定位置到更高在控制器开时
Displacement actual-/setposition to high during 'controller switch on'
37108: 主轴上补偿距离计算限定在最小值
Calculated compensation distance of master axis limited to minimum
37109: 从触发超出窗口Master trigger out of window
37110: 主位置在启始高于触发1 位置Masterposition at start higher than 1. triggerposition
37111: 凸轮曲线数据:在幂数据Y (X)和从周期不同
Cam profile data: Difference between polynomial value y(xn) and slave period
Info(REAL): Difference
37112: 凸轮曲线数据幂超过限定值
Polynomial within cam profile data exceeds limit value
Info(UINT): Detail
38000: 电流控制器:计算电流偏差不可能Current controller: Calculation of current offset not
possible
38001: 电流元件限定超过最大变频电流
Current quadrature component limited to maximal inverter current
Info(REAL): Maximal inverter current
39001: Endat 编码器:位置修正激活Endat encoder: Position correction active
Info(USINT): Slot
39002: 旋变:速度限定在14 位分辨率超出Resolver: Speed limit for 14 bit resolution exceeded
Info(USINT): Slot
39003: Endat 编码器:报警置位Endat encoder: Alarm bit is set
Info(USINT): Slot
39004: Endat 编码器:报警位-亮失败Endat encoder: Alarm bit - Lighting failure
Info(USINT): Slot
39005: Endat 编码器:报警位-信号放大太小Endat encoder: Alarm bit - Signal amplitude too small
Info(USINT): Slot
39006: Endat 编码器:报警位-检测位置值Endat encoder: Alarm bit - Defective position value
Info(USINT): Slot
39007: Endat 编码器:报警位-过压Endat encoder: Alarm bit - Overvoltage
Info(USINT): Slot
39008: Endat 编码器:报警位-低压Endat encoder: Alarm bit - Undervoltage
Info(USINT): Slot
39009: Endat 编码器:报警位-过流Endat encoder: Alarm bit - Overcurrent
Info(USINT): Slot
39010: Endat 编码器:报警位-需要更换电池Endat encoder: Alarm bit - Battery change required
Info(USINT): Slot
39011: Endat 编码器:警告位:频率太大Endat encoder: Warning bit - Frequency too large
Info(USINT): Slot
39012: Endat 编码器:警告位:温度太大Endat encoder: Warning bit - Temperature too large
Info(USINT): Slot
39013: Endat 编码器:警告位:保留灯到达Endat encoder: Warning bit - Lighting reserve reached
Info(USINT): Slot
39014: Endat 编码器:警告位:电池充电太小Endat encoder: Warning bit - Battery charge too small
Info(USINT): Slot
39015: Endat 编码器:警告位:参考位未到达Endat encoder: Warning bit - Reference point not
reached
Info(USINT): Slot
39016: 增量编码器评估:频率太大Incremental encoder emulation: Freqency too large
Info(UINT): Slo
t
39017: Endat 编码器:读位置CRC 校验错Endat encoder: CRC error while reading position
Info(USINT): Slot
39200: DC 连接电路:单相功率线或缺相DC link circuit: Single phase power line or less line
voltage
Info(REAL): Nominal dc bus voltage
39300: 数字量IO:通道1 不能设置为输入Digital IO: Channel can not be set. Configurated as
input.
Info(UINT): Slot
39301: 数字量IO:24V 电源故障Digital IO: 24V power supply fail
Info(UINT): Slot
39302: 数字量IO:1-4 诊断位激活(IO 电流,24V 供电)
Digital IO 1-4: Diagnose bit active (IO current, 24V supply)
Info(UINT): Slot
39303: 数字量IO:5-8 诊断位激活(IO 电流,24V 供电)
Digital IO 5-8: Diagnose bit active (IO current, 24V supply)
Info(UINT): Slot
39304: 数字量IO:9 诊断位激活(IO 电流,24V 供电)
Digital IO 9: Diagnose bit active (IO current, 24V supply)
Info(UINT): Slot
39305: 数字量IO:10 诊断位激活(IO 电流,24V 供电)
Digital IO 10: Diagnose bit active (IO current, 24V supply)
Info(UINT): Slot
39306: 数字量IO:9-10 过流Digital IO 9-10: Overcurrent
Info(UINT): Slot
41001: IGBT 表面温度超温Heatsink overtemperature
Info(REAL): Heatsink temperatur
41011: 电机超温Motor overtemperature
Info(REAL): Motor temperatur
41031: IGBT PN 结超温Junction overtemperature
Info(REAL): Junction temperatur
41041: 制动系统超温Bleeder overtemperature
Info(REAL): Bleeder temperatur
41051: 峰值电流过载Peak current overload (i2t)
Info(REAL): Peak current load [%]
41061: 持续电流过载Continuous current overload (i2t)
Info(REAL): Continuous current load [%]
41070: 电机超温(温度模型)Motor overtemperature (temperature model)
Info(REAL): Calculated motor temperatur
41300: 电流控制器:IGBT 功率过流Current controller: Overcurrent IGBT (current not
measurable)
Info(REAL): Modulo of the current phasor
41301: 电流控制器:IGBT 功率过流停止
Current controller: Stop due to overcurrent IGBT (current not measurable)
Info(REAL): Modulo of the current phasor
64001: ncalloc 小于在NC 管理器定义的任务级别
ncalloc in slower task class than defined for NC Manager Task
64003 :POWERLINK 插线错误,
64500: 正向速度限定激活Positive speed limiter active
64501: 负向速度限定激活Negative speed limiter active
64502: 正向加速力矩限定激活Positive direction acceleration torque limiter active
64503: 负向加速力矩限定激活Negative direction acceleration torque limiter active
64504: 正向减速力矩限定激活Positive direction deceleration torque limiter active
64505: 负向减速力矩限定激活Negative direction deceleration torque limiter active
64506: 再生电源限定激活(减速到高)Regenerativ power limiter active (deceleration to high)
65535: 反应错误Response Error
注意:根据ACP10 SW
版本不同,以上ACOPOS 出错代码表会有所不同,具体信息请查阅AS 在线帮助。
贝加莱伺服驱动器报警故障维修 贝加莱伺服驱动器显示故障代码维修贝加莱放大器维修 贝加莱控制器维修 贝加莱伺服放大器维修 贝加莱伺服控制器代码维修
贝加莱伺服放大器报警代码维修 维修贝加莱伺服驱动器 贝加莱系统故障维修
业维修贝加莱驱动器,工控机,触摸屏,伺服电机,伺服马达维修,编码器故障,线圈短路、接地,零点校准。驱动器ACOPOS系列:ACOPOS 1010,ACOPOS
1016,ACOPOS 1022,ACOPOS 1045,ACOPOS 1090,ACOPOS 1180,ACOPOS 1320,ACOPOS
1640,ACOPOS128M,有测试平台,伺服电机型号:8MS,8LS,8LV,8LD,8JS,8KT维修贝加莱(B&R)常见故障:贝加莱(B&R)无显示维修、贝加莱(B&R)缺相维修、贝加莱(B&R)过流维修、贝加莱(B&R)过压维修、贝加莱(B&R)欠压维修、贝加莱(B&R)过热维修、贝加莱(B&R)过载维修、贝加莱(B&R)接地维修、贝加莱(B&R)参数错误维修、贝加莱(B&R)有显示无输出维修、贝加莱(B&R)维修过程使用原厂配件进行芯片级更换
专业维修贝加莱驱动器, 配件齐全,维修速度快,对出现4005 4007 7210 7215 7200 6200 6019 6030
6021等常见故障可快速修复.
贝加莱(B&R)ACOPOS全系列维修,列举如下:8V1010.50-2 8V1016.50-2 8V1010.00-2 8V1016.00-2
8V1022.00-2 8V1045.00-2 8V1090.00-2 8V1180.00-2 8V1320.00-2
8V1640.00-2 8V128M.00-2
贝加莱驱动器ACOPOSmulti全系列维修,型号列举如下:
8BVI0014HWSx.000-1
8BVI0028HWSx.000-1
8BVI0055HWSx.000-1
8BVI0110HWSx.000-1
8BVI0220HWSx.000-1
8BVI0330HWSx.000-1
8BVI0440HWSx.000-1
8BVI0660HWSx.000-1
8BVI0880HWSx.004-1
8BVI1650HWSx.000-1
8BVI0014HCSx.000-1
8BVI0028HCSx.000-1
8BVI0055HCSx.000-1
8BVI0110HCSx.000-1
8BVI0220HCSx.000-1
8BVI0330HCSx.000-1
8BVI0440HCSx.000-1
贝加莱电机 8LSA25.R0060D000-0 伺服驱动器
贝加莱伺服电机8MSA4M.R0-B4
贝加莱 伺服电机 8MSA2L.R0-42 8MSA3M.R0-B4 8MSA3M.R0-30
8LSA45.E3060D200-0 贝加莱伺服电机
贝加莱伺服电机8LSA25.D9060S000-3
贝加莱伺服电机8LVA22.R0030D000-0
贝加莱伺服电机8MSA5M 8MSA5M.R0-V401编码器头子处损坏
贝加莱伺服电机 8MSA2L R0-42 二手原装拆机
贝加莱伺服电机8LSA35.DB030S000-3 原装现货
贝加莱伺服电机 8LSA34.EB022D000-0
贝加莱伺服电机8LSA55.E2030D000-0
贝加莱伺服电机8MSA2L.R0-42包好拆机
贝加莱伺服电机8MSA4S R0-B5 接线柱断
8MSA3X.R0-30 贝加莱伺服电机
贝加莱伺服电机8MSA3L.RO-32
贝加莱伺服电机维修8LSA75.DA030S000-3维修抖动不转
贝加莱伺服电机8MSA2L.R0-42现货销售
贝加莱伺服电机 8LSA56.E2030C000-1维修
贝加莱伺服电机维修 8MSA5X.R0-B5 轴承卡死 线圈短路 编码器不转
维修 贝加莱伺服电机8MSA3L.R0-31轴承卡死 线圈短路 编码器不转
维修 贝加莱伺服电机8LSA56.E2030C000-1短路 震动 换轴承 换线圈
B&R 8LSA25.D9060S100-3 贝加莱全新伺服电机
AUSTRIA贝加莱8LS三相同步电机全新原装进口8LSA33.E1030D300-3
AUSTRIA贝加莱8LS三相同步电机全新原装进口8LSA33.EB045D000-3
B&R贝加莱8MSA4L.E3-X2伺服电机专业维修
NP015S-MF1-10-1E1/贝加莱8LSA34.E2030D000-0德国减速机伺服电机
8MSA3M.R0-B4 伺服电机 全新库存8MSA3M.R0-B4
贝加莱电机 8MSA2M.R0-45加WPLE 60减速机
贝加莱电机80MPH4.500S000-01 7CP470.60-1
贝加莱电机8LSA35.DB030S200-3 8LSA55.DA030S000-3
全新无包装贝加莱电机 8JSA53-E6040D701-1现货正品
贝加莱电机8LSA35.DB030S100-3 8LSA37.DB060S200-3
8LSA35.DB030S100-3 贝加莱电机
二手 贝加莱伺服电机编码器atas ER5Kd286旋转变压器
贝加莱伺服电机 A23.R0030D000-0 8GP30-LVA23-00026
贝加莱伺服电机维修8MSA8S.E1-P10C 运行抖动 跑位
贝加莱伺服电机维修8MSE8M.E1-D32C 编码器报警抖动异响
8CM010.12-1 贝加莱伺服电机专用电缆
贝加莱伺服电机X20CP1586 X67DI1371 X67DO1332 5CFCRD.2048-06
贝加莱伺服驱动器维修80VD100PD.C022-14/80VD100PD.C033-01维修
贝加莱伺服驱动器 控制器 驱动板 主板维修ACOPOS 1010 1016
贝加莱伺服器 驱动器维修ACOPOS1022 ACOPOS1045 ACOPOS1090
Acopos 8V1180.00-2 8V1320.00-2 贝加莱伺服驱动器维修
8BVI0028HCD0.000-1贝加莱伺服双轴驱动器维修
贝加莱伺服器驱动板 配件CS0174100180-02触发板
贝加莱ACOPOS1045伺服驱动器8V1045.00-2
8V1022.00-1原装成色新B&R贝加莱ACOPOS1022伺服驱动器
贝加莱1016,8V1016.00-2 贝加莱驱动器
贝加莱1010 8V1010.00-2 贝加莱驱动器
贝加莱伺服驱动器 BV1022.00-2
贝加莱驱动器控制卡 AC 122 8AC122.60-2/8RC122.60-2
二手 贝加莱伺服驱动器 8V1010.00-2
二手 贝加莱伺服驱动器 8V1016.00-2
贝加莱(Automation PC)伺服驱动器8V1045.00-2专业检测维修
贝加莱伺服驱动器BV1022.00-2专业维修服务 修好保3个月
Acopos multi CO160贝加莱伺服驱动器8B0CO160HW00.000-1现货
贝加莱ACOPOS 1320伺服驱动器8V1320.00-2现货出售
贝加莱伺服驱动器ACOPOS 1045现货出售
精修贝加莱1090伺服驱动器 1320 1022 128M批量接单快速维修
精修Acopos multi CO160贝加莱伺服驱动器8B0CO160HW00.000-1
贝加莱全新伺服控制器/驱动器 8V1010 1010 有测试平台可以维修
8BVP0440HW00.000-1 拆机贝加莱驱动器REV.K0 九新 功能正常
ACOPOS 1090 贝加莱伺服驱动器 放大器 8V1090.00-2 维修
B&R贝加莱伺服驱动器8BVI0014HCS0.000-1
全新原装正品贝加莱伺服驱动器ACOPOS 10014D 8V1320.001-2
全新原装正品贝加莱伺服驱动器ACOPOS 8B0C0320HC00.002-1
贝加莱伺服驱动器8BVI0055HCD0.000-1、8BVP0440HC00.000-1
B&R贝加莱伺服驱动器8B0C0320HW00.002-1
伺服驱动器故障明细表: 参数ID无效. 参数不可读[变量不能在该时刻读取] 对只读参数写访问 对只读参数读访问 参数数值无效,变量格式. 参数数值无效,变量格式. 参数数值无效,变量格式. 数据块读访问已经初始化 数据块写访问已经初始化
10.数据块读访问未初始化
11.数据块写访问未初始化,
12数据块读访问仍激活.
13数据块写访问仍激活.
14读响应超时.
15写响应超时.
16数据块数据段在读已经在最后.
17数据块数据段在写已经在最后
18数据块数据段未在最后.
19数据段未在写数据块的最后.
20数据块读后检验和无效.
21数据块写后检验和无效.
22参数ID在数据块中无效.[读数据块]
23参数ID在数据块中无效[写数据块]
24在启动状态不允许下载系统模块.
25只在下载后立即烧结系统模块.
26在启动状态不允许改变启动状态请求.
27启动操作不可能[操作系统不在FPROM存储器中]
28在此驱动状态不允许写参数.
29在此驱动状态不允许写参数.
30因为硬件故障不能读参数.
31因为硬件故障不能写参数.
32命令参数无效.
40参数数值大于最大值.
41参数数值大于最大值.
42参数数值大于最大值.
43参数1数值大于最大值.
44参数1数值大于最大值.
45参数1数值大于最大值.
46参数2数值大于最大值.
47参数2数值大于最大值.
48参数2数值大于最大值.
49参数3数值大于最大值.
50参数3数值大于最大值.
51参数3数值大于最大值.
52参数数值小于最小值.
53参数数值小于最小值.
54参数数值小于最小值.
55参数1数值小于最小值.
56参数1数值小于最小值.
57参数1数值小于最小值.
58参数2数值小于最小值
59参数2数值小于最小值.
60参数2数值小于最小值.
61参数3数值小于最小值.
62参数3数值小于最小值.
63参数3数值小于最小值.
64硬件ID在BAR模块中无效.
65硬件版本在BAR模块中无效.
66硬件ID的操作系统不兼容现在的总线网络.
1001数值先进先出溢出.
1002参数超出有效范围.
1003在回路控制激活时不允许写参数.
1004激活信号控制网络超时.
1005在动作激活时不允许写参数.
1006用于触发事件[数字量输入+边沿]
1007主站用于网络耦合未激活-编码器错误.
1009内存分配错误.
1010先进先出功能溢出.
1011快停输入激活.
1012循环网络通讯切断.
1013用于网络通讯的站点不可行.
1014AC112命令接口占用.
2001上载跟踪曲线数据不允许,记录激活.
2002无跟踪曲线数据可上载.
2003跟踪曲线启动不允许:记录激活.
2004跟踪曲线启动不允许:未定义跟踪数据.
2005无效的参数ID用于跟踪测试数据.
2006初试跟踪参数不允许:记录激活.
4002在仿真命令无效的动作代码.
4004在控制器命令无效动作的代码
4005使能控制器无效,驱动器错误.
4007跟随误差超限停止.
4008正限位开关到达.
4009负限位开关到达.
4010使能控制器无效,两限位关闭
4011关闭控制器无效:运动激活.
4012使能控制器无效:初始参数丢失或无效.
4014双编码器控制:位置偏差超限停止.
5001目标位置大于正向软限位.
5002目标位置小于负向软限位.
5003正向软限位到达.
5004负向软限位到达.
5005运动启动可能:位置控制器未激活.
5006运动启动不可能:轴未寻参考位置.
5010正向位置运动不可能:正向限位开关关闭.
5011负向位置运动不可能:负向位开关关闭.
5012运动启动不可能:停止激活.
5013打开循环设值模式不可能:运动激活.
5014关闭循环设值模式不可能.
5015运动启动不可能:正在寻参.
5016写参数不允许:正在寻参.
5017寻参步骤模式不可能:位置控制器未激活.
5018寻参步骤模式不可能:运动激活.
5019寻参参数超出有效值.
5020寻参步骤不可能;两个限位开关关闭.
5021限位开关关闭;无方向改变用于寻参.
5022第二个限位开关信号收到:参考开关信号未发现.
5023对于当前运动方向收到不正确的限位开关信号.
5024循环设置数据模式放弃:设定位置丢失.
5025设置参考点位置偏差用于修正计数范围不可能.
5026基本运动参数超过速度限制.
5027基本运动参数超过加速度限制.
5028当前运动不是基本运动,
5029触发忽略-保持位置超过软限位.
5030寻参步骤模式不可能:位置控制器激活,
5031寻参步骤模式不可能:循环设值班模式关闭.
5101凸轮曲线补偿:超出界限值.
5102过多的变化在每个凸轮曲线(主周期过短)
5103从触发先进先出满. 510
上电花屏、白屏、黑屏、蓝屏,不正常开机,不能触摸、触摸不准,按触摸屏无反应或反应慢、内容错乱、进不了系统界面、无背光、背光暗、有背光无字符、不能通信、按键无反应或损坏,电源板、高压板故障,液晶屏、主板坏等等,针对触摸屏触摸镜片的损坏以及液晶屏的损坏,公司元件库配备有多种型号的配件。
Panelware贝加莱触摸屏常见型号:4PP220.0571-45、4PP045.0571-062、4P3040.01-490、5PP120.0571-27、4PP182.1043-31、4PP120.0571-01、4PP120.0571-21、4PP120.1043-31、4PP120.1505-31、4PP151.0571-01、4PP151.0571-21、4PP151.1043-31、4PP151.1505-31、4PP152.0571-01、4PP152.0571-21、4PP152.1043-31、4PP180.1043-31、4PP180.1505-31、4PP181.1043-31、4PP181.1505-31、4PP182.1043-31等触摸屏
B&R贝加莱伺服控制器维修故障范围:无输出、三相不平衡、过流、过压、欠压、过热、过载、接地故障、模块损坏、不能通讯等。
贝加莱伺服控制器维修型号:ACOS1090、ACOPS1640、ACOPOS1045、ACOPOS1320、ACOPOS128M、ACOPOS1180、ACOPOS1010。
贝加莱伺服电机维修故障包括:不能启动、发动无力、运转抖动、失磁、过流、过载、跑位、输出不平衡、匝间短路、编码器报警、编码器损坏、找不到零点等。
B&R贝加莱伺服控制器维修常见故障代码:4005、007、210、7215、7200、6020、6032、6033、6040、7014、7017、7017、7213、7302、9060、
9070、9070、9070、32001、32001。
B&R贝加莱伺服驱动器8BVI0014HWS0.000-1
贝加莱 8V1010.00-2 AC110 AC122 原装拆机伺服驱动器
8V1022.00-1原装成色新B&R贝加莱ACOPOS1022伺服驱动器
二手贝加莱ACOPOS伺服驱动器选件卡CAN通讯卡AC122 8AC122.60-1
ACOPOS贝加莱驱动器8V1320维修
贝加莱驱动器8V1180.00-2维修 贝加莱驱动器维修

